实验四 中断
中断、异常和陷阱指令是操作系统的基石,现代操作系统就是由中断驱动的。本实验的目的在于深刻理解中断的原理和机制,掌握CPU访问设备控制器的方法,掌握Arm体系结构的中断机制和规范,实现时钟中断服务和部分异常处理等。
陷入操作系统
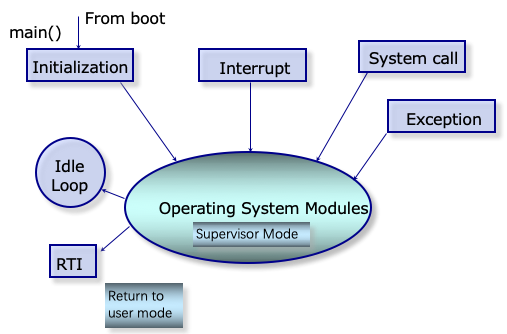
如下图所示,操作系统是一个多入口的程序,执行陷阱(Trap)指令,出现异常、发生中断时都会陷入到操作系统。
Arm的中断系统
中断是一种硬件机制。借助于中断,CPU可以不必再采用轮询这种低效的方式访问外部设备。将所有的外部设备与CPU直接相连是不现实的,外部设备的中断请求一般经由中断控制器,由中断控制器仲裁后再转发给CPU。如下图所示Arm的中断系统。
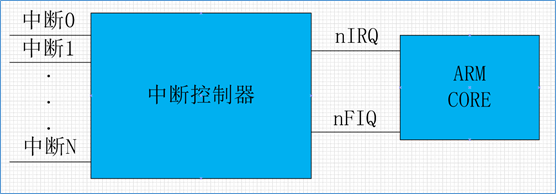
其中nIRQ是普通中断,nFIQ是快速中断。 Arm采用的中断控制器叫做GIC,即general interrupt controller。gic包括多个版本,如GICv1(已弃用),GICv2,GICv3,GICv4。简单起见,我们实验将选用GICv2版本。
为了配置好gicv2中断控制器,与pl011串口一样,我们需要阅读其技术参考手册。访问Arm官网在 这里 下载ARM Generic Interrupt Controller Architecture Specification - version 2.0 的pdf版本。
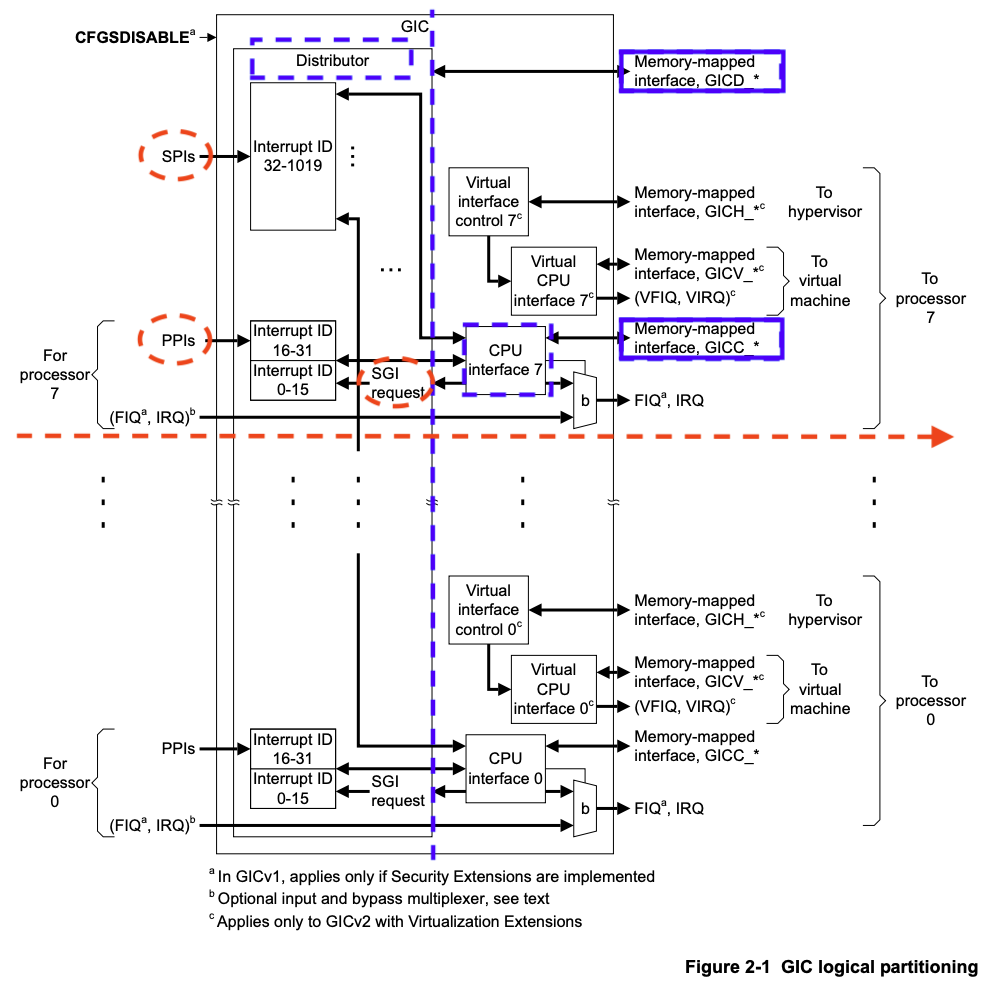
从上图(来源于ARM Generic Interrupt Controller Architecture Specification - version 2.0中的Chapter 2 GIC Partitioning)可以看出:
GICv2 最多支持8个核的中断管理。
GIC包括两大主要部分(由图中蓝色虚竖线分隔,Distributor和CPU Interface由蓝色虚矩形框标示),分别是:
Distributor,其通过GICD_开头的寄存器进行控制(蓝色实矩形框标示)
CPU Interface,其通过GICC_开头的寄存器进行控制(蓝色实矩形框标示)
中断类型分为以下几类(由图中红色虚线椭圆标示):
SPI:(shared peripheral interrupt),共享外设中断。该中断来源于外设,通过Distributor分发给特定的core,其中断编号为32-1019。从图中可以看到所有核共享SPI。
PPI:(private peripheral interrupt),私有外设中断。该中断来源于外设,但只对指定的core有效,中断信号只会发送给指定的core,其中断编号为16-31。从图中可以看到每个core都有自己的PPI。
SGI:(software-generated interrupt),软中断。软件产生的中断,用于给其他的core发送中断信号,其中断编号为0-15。
virtual interrupt,虚拟中断,用于支持虚拟机。图中也可以看到,因为我们暂时不关心,所以没有标注。
此外可以看到(FIQ, IRQ)可通过b进行旁路,我们也不关心。如感兴趣可以查看技术手册了解细节。
此外,由ARM Generic Interrupt Controller Architecture Specification - version 2.0 (section 1.4.2)可知,外设中断可由两种方式触发:
edge-triggered: 边沿触发,当检测到中断信号上升沿时中断有效。
level-sensitive:电平触发,当中断源为指定电平时中断有效。
因为soc中,中断有很多,为了方便对中断的管理,对每个中断,附加了中断优先级。在中断仲裁时,高优先级的中断,会优于低优先级的中断,发送给cpu处理。当cpu在响应低优先级中断时,如果此时来了高优先级中断,那么高优先级中断会抢占低优先级中断,而被处理器响应。
由ARM Generic Interrupt Controller Architecture Specification - version 2.0 (section 3.3)可知,GICv2最多支持256个中断优先级。GICv2中规定,所支持的中断优先级别数与GIC的具体实现有关,如果支持的中断优先级数比256少(最少为16),则8位优先级的低位为0,且遵循RAZ/WI(Read-As-Zero, Writes Ignored)原则。
GICv2初始化
由下图中virt.dts中intc和timer的部分
intc@8000000 {
phandle = <0x8001>;
reg = <0x00 0x8000000 0x00 0x10000 0x00 0x8010000 0x00 0x10000>;
compatible = "arm,cortex-a15-gic";
ranges;
#size-cells = <0x02>;
#address-cells = <0x02>;
interrupt-controller;
#interrupt-cells = <0x03>;
v2m@8020000 {
phandle = <0x8002>;
reg = <0x00 0x8020000 0x00 0x1000>;
msi-controller;
compatible = "arm,gic-v2m-frame";
};
};
timer {
interrupts = <0x01 0x0d 0x104 0x01 0x0e 0x104 0x01 0x0b 0x104 0x01 0x0a 0x104>;
always-on;
compatible = "arm,armv8-timer\0arm,armv7-timer";
};
并结合kernel.org中关于 ARM Generic Interrupt Controller 和 ARM architected timer 的devicetree的说明可知:
intc中的
reg指明GICD寄存器映射到内存的位置为0x8000000,长度为0x10000, GICC寄存器映射到内存的位置为0x8010000,长度为0x10000intc中的
#interrupt-cells指明 interrupts 包括3个cells。第一个文档 指明:第一个cell为中断类型,0表示SPI,1表示PPI;第二个cell为中断号,SPI范围为[0-987],PPI为[0-15];第三个cell为flags,其中[3:0]位表示触发类型,4表示高电平触发,[15:8]为PPI的cpu中断掩码,每1位对应一个cpu,为1表示该中断会连接到对应的cpu。以timer设备为例,其中包括4个中断。以第二个中断的参数
0x01 0x0e 0x104为例,其指明该中断为PPI类型的中断,中断号14, 路由到第一个cpu,且高电平触发。但注意到PPI的起始中断号为16,所以实际上该中断在GICv2中的中断号应为16 + 14 = 30。
阅读ARM Generic Interrupt Controller Architecture Specification - version 2.0,在其Chapter 4 Programmers’ Model部分有关于GICD和GICC寄存器的描述,以及如何使能Distributor和CPU Interfaces的方法。
新建 src/interrupts.rs 文件,定义将使用的各种常量,如寄存器地址和寄存器值等。随后定义init_gicv2函数对GICD和GICC进行初始化。然后定义若干辅助函数用于中断配置。
// GICD和GICC寄存器内存映射后的起始地址
const GICD_BASE: u64 = 0x08000000;
const GICC_BASE: u64 = 0x08010000;
// Distributor
const GICD_CTLR: *mut u32 = (GICD_BASE + 0x0) as *mut u32;
const GICD_ISENABLER: *mut u32 = (GICD_BASE + 0x0100) as *mut u32;
const GICD_ICPENDR: *mut u32 = (GICD_BASE + 0x0280) as *mut u32;
const GICD_IPRIORITYR: *mut u32 = (GICD_BASE + 0x0400) as *mut u32;
const GICD_ICFGR: *mut u32 = (GICD_BASE + 0x0c00) as *mut u32;
const GICD_CTLR_ENABLE: u32 = 1; /* Enable GICD */
const GICD_CTLR_DISABLE: u32 = 0; /* Disable GICD */
const GICD_ISENABLER_SIZE: u32 = 32;
const GICD_ICPENDR_SIZE: u32 = 32;
const GICD_IPRIORITY_SIZE: u32 = 4;
const GICD_IPRIORITY_BITS: u32 = 8;
const GICD_ICFGR_SIZE: u32 = 16;
const GICD_ICFGR_BITS: u32 = 2;
// CPU Interface
const GICC_CTLR: *mut u32 = (GICC_BASE + 0x0) as *mut u32;
const GICC_PMR: *mut u32 = (GICC_BASE + 0x0004) as *mut u32;
const GICC_BPR: *mut u32 = (GICC_BASE + 0x0008) as *mut u32;
const GICC_CTLR_ENABLE: u32 = 1;
const GICC_CTLR_DISABLE: u32 = 0;
// Priority Mask Register. interrupt priority filter, Higher priority corresponds to a lower Priority field value.
const GICC_PMR_PRIO_LOW: u32 = 0xff;
// The register defines the point at which the priority value fields split into two parts,
// the group priority field and the subpriority field. The group priority field is used to
// determine interrupt preemption. NO GROUP.
const GICC_BPR_NO_GROUP: u32 = 0x00;
pub fn init_gicv2() {
// 初始化Gicv2的distributor和cpu interface
// 禁用distributor和cpu interface后进行相应配置
unsafe {
ptr::write_volatile(GICD_CTLR, GICD_CTLR_DISABLE);
ptr::write_volatile(GICC_CTLR, GICC_CTLR_DISABLE);
ptr::write_volatile(GICC_PMR, GICC_PMR_PRIO_LOW);
ptr::write_volatile(GICC_BPR, GICC_BPR_NO_GROUP);
}
// 启用distributor和cpu interface
unsafe {
ptr::write_volatile(GICD_CTLR, GICD_CTLR_ENABLE);
ptr::write_volatile(GICC_CTLR, GICC_CTLR_ENABLE);
}
}
// 使能中断号为interrupt的中断
pub fn enable(interrupt: u32) {
unsafe {
ptr::write_volatile(
GICD_ISENABLER.add((interrupt / GICD_ISENABLER_SIZE) as usize),
1 << (interrupt % GICD_ISENABLER_SIZE)
);
}
}
// 禁用中断号为interrupt的中断
pub fn disable(interrupt: u32) {
unsafe {
ptr::write_volatile(
GICD_ICENABLER.add((interrupt / GICD_ICENABLER_SIZE) as usize),
1 << (interrupt % GICD_ICENABLER_SIZE)
);
}
}
// 清除中断号为interrupt的中断
pub fn clear(interrupt: u32) {
unsafe {
ptr::write_volatile(
GICD_ICPENDR.add((interrupt / GICD_ICPENDR_SIZE) as usize),
1 << (interrupt % GICD_ICPENDR_SIZE)
);
}
}
// 设置中断号为interrupt的中断的优先级为priority
pub fn set_priority(interrupt: u32, priority: u32) {
let shift = (interrupt % GICD_IPRIORITY_SIZE) * GICD_IPRIORITY_BITS;
unsafe {
let addr: *mut u32 = GICD_IPRIORITYR.add((interrupt / GICD_IPRIORITY_SIZE) as usize);
let mut value: u32 = ptr::read_volatile(addr);
value &= !(0xff << shift);
value |= priority << shift;
ptr::write_volatile(addr, value);
}
}
// 设置中断号为interrupt的中断的属性为config
pub fn set_config(interrupt: u32, config: u32) {
let shift = (interrupt % GICD_ICFGR_SIZE) * GICD_ICFGR_BITS;
unsafe {
let addr: *mut u32 = GICD_ICFGR.add((interrupt / GICD_ICFGR_SIZE) as usize);
let mut value: u32 = ptr::read_volatile(addr);
value &= !(0x03 << shift);
value |= config << shift;
ptr::write_volatile(addr, value);
}
}
ARMv8的中断与异常处理
注意
访问Arm官网下载并阅读 ARM Cortex-A Series Programmer’s Guide for ARMv8-A 和 AArch64 Exception and Interrupt Handling 等技术参考手册。
ARMv8 架构定义了两种执行状态(Execution States),AArch64 和 AArch32。分别对应使用64位宽通用寄存器或32位宽通用寄存器的执行 [1] 。

上图所示为AArch64中的异常级别(Exception levels)的组织。可见AArch64中共有4个异常级别,分别为EL0,EL1,EL2和EL3。在AArch64中,Interrupt是Exception的子类型,称为异常。 AArch64 中有四种类型的异常 [2] :
Sync(Synchronous exceptions,同步异常),在执行时触发的异常,例如在尝试访问不存在的内存地址时。
IRQ (Interrupt requests,中断请求),由外部设备产生的中断
FIQ (Fast Interrupt Requests,快速中断请求),类似于IRQ,但具有更高的优先级,因此 FIQ 中断服务程序不能被其他 IRQ 或 FIQ 中断。
SError (System Error,系统错误),用于外部数据中止的异步中断。
当异常发生时,处理器将执行与该异常对应的异常处理代码。在ARM架构中,这些异常处理代码将会被保存在内存的异常向量表中。每一个异常级别(EL0,EL1,EL2和EL3)都有其对应的异常向量表。需要注意的是,与x86等架构不同,该表包含的是要执行的指令,而不是函数地址 [3] 。
异常向量表的基地址由VBAR_ELn给出,然后每个表项都有一个从该基地址定义的偏移量。 每个表有16个表项,每个表项的大小为128(0x80)字节(32 条指令)。 该表实际上由4组,每组4个表项组成。 分别是:
发生于当前异常级别的异常且SPSel寄存器选择SP0 [4] , Sync、IRQ、FIQ、SError对应的4个异常处理。
发生于当前异常级别的异常且SPSel寄存器选择SPx [4] , Sync、IRQ、FIQ、SError对应的4个异常处理。
发生于较低异常级别的异常且执行状态为AArch64, Sync、IRQ、FIQ、SError对应的4个异常处理。
发生于较低异常级别的异常且执行状态为AArch32, Sync、IRQ、FIQ、SError对应的4个异常处理。
新建 src/exceptions.s 文件,参照这里 [3] 定义异常向量表如下:
.section .text.exceptions_vector_table
// Export a symbol for the Rust code to use.
.globl exception_vector_table
exception_vector_table:
.org 0x0000
EXCEPTION_VECTOR el1_sp0_sync
.org 0x0080
EXCEPTION_VECTOR el1_sp0_irq
.org 0x0100
EXCEPTION_VECTOR el1_sp0_fiq
.org 0x0180
EXCEPTION_VECTOR el1_sp0_error
.org 0x0200
EXCEPTION_VECTOR el1_sync
.org 0x0280
EXCEPTION_VECTOR el1_irq
.org 0x0300
EXCEPTION_VECTOR el1_fiq
.org 0x0380
EXCEPTION_VECTOR el1_error
.org 0x0400
EXCEPTION_VECTOR el0_sync
.org 0x0480
EXCEPTION_VECTOR el0_irq
.org 0x0500
EXCEPTION_VECTOR el0_fiq
.org 0x0580
EXCEPTION_VECTOR el0_error
.org 0x0600
EXCEPTION_VECTOR el0_32_sync
.org 0x0680
EXCEPTION_VECTOR el0_32_irq
.org 0x0700
EXCEPTION_VECTOR el0_32_fiq
.org 0x0780
EXCEPTION_VECTOR el0_32_error
.org 0x0800
在 src/exceptions.s 中定义异常向量表使用的 EXCEPTION_VECTOR 宏和宏中用的 .exit_exception 函数。
.equ CONTEXT_SIZE, 264
.section .text.exceptions
.macro EXCEPTION_VECTOR handler
sub sp, sp, #CONTEXT_SIZE
// store general purpose registers
stp x0, x1, [sp, #16 * 0]
stp x2, x3, [sp, #16 * 1]
stp x4, x5, [sp, #16 * 2]
stp x6, x7, [sp, #16 * 3]
stp x8, x9, [sp, #16 * 4]
stp x10, x11, [sp, #16 * 5]
stp x12, x13, [sp, #16 * 6]
stp x14, x15, [sp, #16 * 7]
stp x16, x17, [sp, #16 * 8]
stp x18, x19, [sp, #16 * 9]
stp x20, x21, [sp, #16 * 10]
stp x22, x23, [sp, #16 * 11]
stp x24, x25, [sp, #16 * 12]
stp x26, x27, [sp, #16 * 13]
stp x28, x29, [sp, #16 * 14]
// store exception link register and saved processor state register
mrs x0, elr_el1
mrs x1, spsr_el1
stp x0, x1, [sp, #16 * 15]
// store link register which is x30
str x30, [sp, #16 * 16]
mov x0, sp
// call exception handler
bl \handler
// exit exception
b .exit_exception
.endm
.exit_exception:
// restore link register
ldr x30, [sp, #16 * 16]
// restore exception link register and saved processor state register
ldp x0, x1, [sp, #16 * 15]
msr elr_el1, x0
msr spsr_el1, x1
// restore general purpose registers
ldp x28, x29, [sp, #16 * 14]
ldp x26, x27, [sp, #16 * 13]
ldp x24, x25, [sp, #16 * 12]
ldp x22, x23, [sp, #16 * 11]
ldp x20, x21, [sp, #16 * 10]
ldp x18, x19, [sp, #16 * 9]
ldp x16, x17, [sp, #16 * 8]
ldp x14, x15, [sp, #16 * 7]
ldp x12, x13, [sp, #16 * 6]
ldp x10, x11, [sp, #16 * 5]
ldp x8, x9, [sp, #16 * 4]
ldp x6, x7, [sp, #16 * 3]
ldp x4, x5, [sp, #16 * 2]
ldp x2, x3, [sp, #16 * 1]
ldp x0, x1, [sp, #16 * 0]
// restore stack pointer
add sp, sp, #CONTEXT_SIZE
eret
完整的代码参见 exception.s。
在 src/interrupts.rs 中引入 exceptions.s,同时定义结构 ExceptionCtx,这与通过 EXCEPTION_VECTOR 宏保存的寄存器数据对应。
global_asm!(include_str!("exception.s"));
#[repr(C)]
pub struct ExceptionCtx {
regs: [u64; 30],
elr_el1: u64,
spsr_el1: u64,
lr: u64,
}
在 EXCEPTION_VECTOR 宏中,每一类中断都对应一个处理函数,以 el1_sp0_sync 为例,其代码如下:
const EL1_SP0_SYNC: &'static str = "EL1_SP0_SYNC";
// 调用我们的print!宏打印异常信息,你也可以选择打印异常发生时所有寄存器的信息
fn catch(ctx: &mut ExceptionCtx, name: &str) {
crate::print!(
"\n \
{} @ 0x{:016x}\n\n ",
name,
ctx.elr_el1,
);
}
#[no_mangle]
unsafe extern "C" fn el1_sp0_sync(ctx: &mut ExceptionCtx) {
catch(ctx, EL1_SP0_SYNC);
}
你需要为异常向量表中其他所有的中断类型定义类似函数。
此外,我们还要在 start.s 中载入异常向量表 exception_vector_table
.section ".text.boot"
_start:
ldr x30, =LD_STACK_PTR
mov sp, x30
// Initialize exceptions
ldr x0, =exception_vector_table
msr vbar_el1, x0
isb
_start_main:
bl not_main
最后,我们还要处理一下链接脚本 aarch64-qemu.ld,为在 exceptions.s 中所定义的 exceptions_vector_table 选择位置,同时满足其4K对齐要求。
.text :
{
KEEP(*(.text.boot))
*(.text.exceptions)
. = ALIGN(4096); /* align for exceptions_vector_table*/
*(.text.exceptions_vector_table)
*(.text)
}
至此,我们已经在EL1级别定义了完整的中断处理框架,可以开始处理实际的中断了。
使能时钟中断
首先在 src/interrupts.rs 定义相关常数:
// 电平触发
const ICFGR_LEVEL: u32 = 0;
// 时钟中断号30
const TIMER_IRQ: u32 = 30;
然后在 init_gicv2 函数中使能timer中断,同时配置timer每秒产生一次中断。
set_config(TIMER_IRQ, ICFGR_LEVEL); //电平触发
set_priority(TIMER_IRQ, 0); //优先级设定
clear(TIMER_IRQ); //清除中断请求
enable(TIMER_IRQ); //使能中断
//配置timer
unsafe {
asm!("mrs x1, CNTFRQ_EL0"); //读取系统频率
asm!("msr CNTP_TVAL_EL0, x1"); //设置定时寄存器
asm!("mov x0, 1");
asm!("msr CNTP_CTL_EL0, x0"); //enable=1, imask=0, istatus= 0,
asm!("msr daifclr, #2");
}
小技巧
mrs类指令阅读技巧: MRS(Move to Register from State register)